Hopping microbots
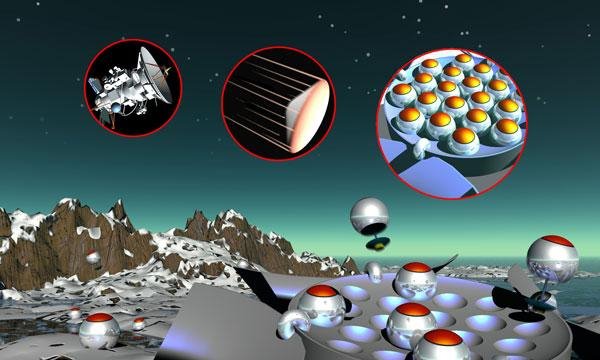
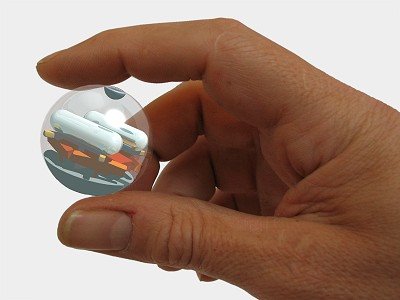 Exploring planets like Mars with robots are expensive and time consuming. The success of a mission is linked to the survival of a single robot. Therefore the idea of a swarm of small cost-effective robots are appealing. Since the loss of a few units won't necessarily lead to the failure of a mission. Dr. Penlope and Dr. Steve Dubowsky have proposed a design of multiple jumping robots the size of tennis balls. All equipped with a camera and communication systems. Orientating themselves and other units to perform a intelligent collective autonomous behaviour. Each unit carrying a few instruments adding to the swarms ensemble. So that the swarm will have the ability of adapting to and investigating the environment.
Exploring planets like Mars with robots are expensive and time consuming. The success of a mission is linked to the survival of a single robot. Therefore the idea of a swarm of small cost-effective robots are appealing. Since the loss of a few units won't necessarily lead to the failure of a mission. Dr. Penlope and Dr. Steve Dubowsky have proposed a design of multiple jumping robots the size of tennis balls. All equipped with a camera and communication systems. Orientating themselves and other units to perform a intelligent collective autonomous behaviour. Each unit carrying a few instruments adding to the swarms ensemble. So that the swarm will have the ability of adapting to and investigating the environment.In December 2005 NIAC the NASA Institute for Advanced Concepts awarded the idea with the Phase II grant. So that the inventors could develop the design and testing it on earth.

The jumping motion will be ensured by letting the robots be weighted in one side so that they always will come to rest in a specific orientation. They will also be able to control their direction and perhaps even able to perform a rolling motion.
A example of the benefit of the swarm idea is the ability to adapt to terrain. As an example the units could be used exploring caves on Mars with a great chance of extracting themselves out of the caves when they have investigated it. To enter the caves and still remain i contact with the earth the units could be used as relay points allowing a network to stretch into the cave.
Filip Wistrand
NT061734A
Reference:
New Scientist Space
Universe Today
Astrobiology Magazine









