Groundhog - The Mine-Mapping Robot
Groundhog is a mine-mapping robot developed by Carnegie Mellon University (CMU) in response to a mining accident due to inaccurate maps.
Its objective was to explore and map a large abandoned coal mine accurately and reliably, so as to ensure safety of the miners.
 Groundhog is equipped with:
Groundhog is equipped with:
-tiltable SICK laser range finders to obtain scans efficiently
-cameras, tilt, gas and sinkage sensors to obtain data
-a gyroscope to allow it to get through the obstacles and the different terrains within the mine
-a wireless video system for data obtained to be seen by the team outside the mine
Groundhog makes use of the perception technology - Simultaneous Localization and Mapping (SLAM), to derive maps from the data obtained in real time. With autonomous and mapping technology, Groundhog has to make decisions by itself on how and where to go, and to return outside with the required information.
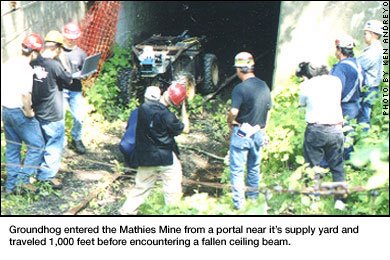
The hallmark of Groundhog and its incorporated technology came when it encountered a fallen beam, and made the right decision to retreat. Under development, this was an unforeseen situation. Yet through Groundhog’s own analysis, it decided the beam was unsafe to cross, and appropriately retreated.
I think this is an excellent example of how autonomous robotics can be incorporated into real-world situations. With further development, robots like Groundhog can help ensure safety of workers in mining and in other areas such as deep sea excavation.
References:
http://www.cmu.edu/cmnews/extra/2002/021031_groundhog.html
http://www.ais.fraunhofer.de/ARC/3D/download/icra2004/node3.html
http://www.ri.cmu.edu/projects/project_509.html
http://www.cmu.edu/cmnews/030625/030625_minemap.html









