Robot for Home Floor Cleaning
U0205295 Li Lei
 Tubby is an autonomous floor cleaning robot which is designed by Samit Gokhale in university of Florida . It uses two brushes below the robot to sweep the floor as it moves around. Tubby initially follows a wall, cleaning close to the wall, then it performs random movements and avoids obstacles, thus cleaning the entire surface area.
Tubby is an autonomous floor cleaning robot which is designed by Samit Gokhale in university of Florida . It uses two brushes below the robot to sweep the floor as it moves around. Tubby initially follows a wall, cleaning close to the wall, then it performs random movements and avoids obstacles, thus cleaning the entire surface area.
 Navigation Technology:
Navigation Technology:
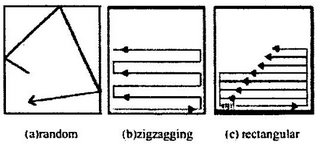
Navigation methods of the cleaning robot can be considered as follows: (1) Random advance: the robot moves forward until colliding with an obstacle, and if it run against and obstacle, it turns around to the opposite directions of the obstacle and moves forward as in (a). (2) Zigzagging advance: the robot moves forward in a zigzagging form as shown in (b). (3) Rectangular spiral advance: the robot moves forward in a rectangular spiral form as shown in (c). When the robot goes along the wall, it modifies its direction to be parallel the wall. Tubby follows the first navigation method with certain modifications.
 Nowadays, many kinds of clean robot have already been sold in the market, like Roomba Pro Elite FloorVac and RC 3000 cleaning Robot. Roomba Pro Elite is the ultimate in automated home floor care. It uses intelligent navigation technology to automatically clean nearly all household floor surfaces without human direction. In addition, a wealth of added features and accessories will give customers more ways to clean, and more ways to store their machine. In future, I believe these kinds of home assistant robots will become more and more popular so that people can spend less time working and more time enjoying their lives, especially for housewives.
Nowadays, many kinds of clean robot have already been sold in the market, like Roomba Pro Elite FloorVac and RC 3000 cleaning Robot. Roomba Pro Elite is the ultimate in automated home floor care. It uses intelligent navigation technology to automatically clean nearly all household floor surfaces without human direction. In addition, a wealth of added features and accessories will give customers more ways to clean, and more ways to store their machine. In future, I believe these kinds of home assistant robots will become more and more popular so that people can spend less time working and more time enjoying their lives, especially for housewives.
Yong-Joo oh and Yoshio Watanabe, “Development of Small Robot for Home Floor Cleaning”, SICE 2002, 3222 - 3223 vol.5
The great and rapid spread of electronic and mechatronic technologies in the last decades have led to a massive introduction of technological devices in many aspects of every day life, from vocational activity to hobby and leisure. The introduction of technological devices in personal life and especially in activities at home enables people in need for support to reduce the daily housework.
 Tubby is an autonomous floor cleaning robot which is designed by Samit Gokhale in university of Florida . It uses two brushes below the robot to sweep the floor as it moves around. Tubby initially follows a wall, cleaning close to the wall, then it performs random movements and avoids obstacles, thus cleaning the entire surface area.
Tubby is an autonomous floor cleaning robot which is designed by Samit Gokhale in university of Florida . It uses two brushes below the robot to sweep the floor as it moves around. Tubby initially follows a wall, cleaning close to the wall, then it performs random movements and avoids obstacles, thus cleaning the entire surface area.A Motorola 68HC11 microprocessor is used to control the robot. As the robot has to overcome high surface friction, the actuation of the robot is handled exclusively by two 110 oz-in ball bearing servomotors that have been hacked to work as dc motors. The cleaning brushes are driven by two 43.2 oz-in servomotors. A spherical roller supported by roller bearings supports the rear of the platform. All the electronic and mechanical systems are neatly packed in an aesthetically designed platform using CAD modeling software like Pro-Engineering, and manufactured using Fused Deposition Method. Seven IR sensors are mounted on the platform. Three IR sensors are mounted on front and two each are mounted on the side of the platform. Bump switches are also provided on the front of the platform. In addition to these sensors, a special sensor hacked from a color laser printer is used. These sensors provide the robot with data, which is used to perform obstacle avoidance and wall following. As high torque rating servomotors are used, Tubby is able to travel on carpets as well. Tubby initially performs wall following, then travels the surface simultaneously performing obstacle avoidance to cover the entire floor area. During this the two cleaning brushes are continuously rotating using two servomotors. Thus the four servos provide a complete cleaning job of the entire surface area.
 Navigation Technology:
Navigation Technology:Navigation methods of the cleaning robot can be considered as follows: (1) Random advance: the robot moves forward until colliding with an obstacle, and if it run against and obstacle, it turns around to the opposite directions of the obstacle and moves forward as in (a). (2) Zigzagging advance: the robot moves forward in a zigzagging form as shown in (b). (3) Rectangular spiral advance: the robot moves forward in a rectangular spiral form as shown in (c). When the robot goes along the wall, it modifies its direction to be parallel the wall. Tubby follows the first navigation method with certain modifications.
 Nowadays, many kinds of clean robot have already been sold in the market, like Roomba Pro Elite FloorVac and RC 3000 cleaning Robot. Roomba Pro Elite is the ultimate in automated home floor care. It uses intelligent navigation technology to automatically clean nearly all household floor surfaces without human direction. In addition, a wealth of added features and accessories will give customers more ways to clean, and more ways to store their machine. In future, I believe these kinds of home assistant robots will become more and more popular so that people can spend less time working and more time enjoying their lives, especially for housewives.
Nowadays, many kinds of clean robot have already been sold in the market, like Roomba Pro Elite FloorVac and RC 3000 cleaning Robot. Roomba Pro Elite is the ultimate in automated home floor care. It uses intelligent navigation technology to automatically clean nearly all household floor surfaces without human direction. In addition, a wealth of added features and accessories will give customers more ways to clean, and more ways to store their machine. In future, I believe these kinds of home assistant robots will become more and more popular so that people can spend less time working and more time enjoying their lives, especially for housewives.References:
Yong-Joo oh and Yoshio Watanabe, “Development of Small Robot for Home Floor Cleaning”, SICE 2002, 3222 - 3223 vol.5










{kind=link}