You will never bang into anything again
The assistive robotic walker is one such robot designed to improve the daily life of elderly. It main function is to improve the ease and safety of the pedestrian travels of elderly user. In other words, it prevents the elderly from knocking into obstacles and falling down that might result from sudden change in terrain. However, it does not serve to replace the user’s ability to walk but merely act as a tool to assist the user in walking.
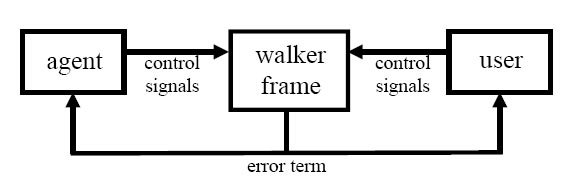 The assistive robotic walker is developed based on a three-wheeled frame rollator. Sonar, infra-red sensors, and motor system to steer the front wheel have been installed. An automatic braking system has also been installed. Input to the walker is obtained via the sensors installed in the handles, in which the different in force applied by the user to the two handles are sensed. Both the user and the agent are able to control the walker frame and both are able to observe the results of the action taken. One important feature of this walker frame is that, it cannot move without the implicit consent of the user and so move on its own. Hence, the control in this robot is not hierarchical.
The assistive robotic walker is developed based on a three-wheeled frame rollator. Sonar, infra-red sensors, and motor system to steer the front wheel have been installed. An automatic braking system has also been installed. Input to the walker is obtained via the sensors installed in the handles, in which the different in force applied by the user to the two handles are sensed. Both the user and the agent are able to control the walker frame and both are able to observe the results of the action taken. One important feature of this walker frame is that, it cannot move without the implicit consent of the user and so move on its own. Hence, the control in this robot is not hierarchical. The walker’s design can be said to be passive, cooperative, and submissive. It is passive because it has no forward drive motor. Therefore, in order to move forward, it relies on the user for motive force. With that, it allows the user to move at his or her own pace, thus giving him or her feeling of control. The walker is said to be cooperative because it tries to infer the user’s path and based on this information, to decide on how to avoid any obstacles in the path of the user. It is submissive because the walker would monitor if the user resisted the actions selected by the walker. If this is the case, the movements will be adjusted. This cycle continues, until the user agrees to the action selected by the walker.
The walker’s design can be said to be passive, cooperative, and submissive. It is passive because it has no forward drive motor. Therefore, in order to move forward, it relies on the user for motive force. With that, it allows the user to move at his or her own pace, thus giving him or her feeling of control. The walker is said to be cooperative because it tries to infer the user’s path and based on this information, to decide on how to avoid any obstacles in the path of the user. It is submissive because the walker would monitor if the user resisted the actions selected by the walker. If this is the case, the movements will be adjusted. This cycle continues, until the user agrees to the action selected by the walker.- How does the frame walker infer the path of the user?
The frame walker made use of a path inference algorithm to infer the intended path of the user. At each step, the walker estimates the probability that the user is traveling on each of the possible arc from its current position by assigning a weight to each of the paths available. One question may pop up from your mind? What if the user turns the frame walker in place? Through that, he or she could in fact move to any point in a straight line. However, the frame walker is designed in such a way that, it assumes that the user usually do not operate the rollator in such a way. Most of the time, the walker is moved in a non-holonomic style. All the motions are a combination of translation and rotation, in other words and arc.
How much weight to give to each path is depending on the orientation of the walker. Paths are first weighted by the orientation of the walker. If the path translation component is the same direction as that indicated by the walker sensor, more weight would be given to that path than its opposite component. When the walker is at rest, more weight will be given to path in front of the walker.
Next, the paths are weighted by length. In the beginning, longer paths are given more weight. Paths are then weighted by a history of the user steering input. Additional weight will be given to paths that are similar to the arc traveled in the last time step. The walker would select the path with the highest weight.
The sensors in the walker allow it to monitor the difference in force applied to both handles. When more force is applied to one handle, the walker will turn in the opposite direction. The amount of translation and rotation would be determined by the difference in force applied. If the difference is large, there would be more rotation and less translation. Equal force on both handle would mean that the walker would move either forward or backward.
What happen when the path selected by the walker does not corresponds to the desired path of travel of the user? In this case, the agent would reduce the weight of paths near the direction of the wheel orientation. At the same time, the agent would increase the weight of path around the direction indicated by the user.
The action taken by the agent helps to prevent the user from falling or knocking into obstacles. However, in the event of danger, the walker would override the commands issued by the user. Other than that, under normal situation, the user would be in control.
- Obstacles Avoidance
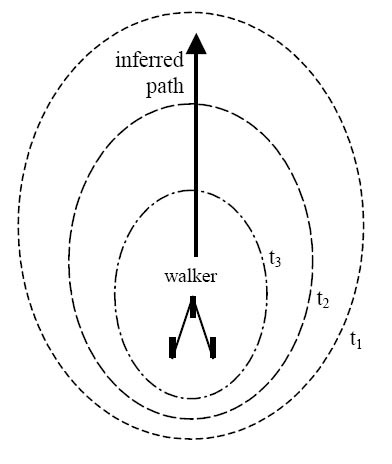 Obstacles avoidance can be broken down into three levels. If the user is relatively near to the obstacle (distance t1), the walker would try to steer away from the obstacle. If the user get closer to the obstacle (distance t2), the walker does not have enough distance to steer away. At such, the brake of the frame walker will be activated slowly, proportional to the walker. However, if the user gets very close to the obstacle (distance t3), the brake will be engaged fully.
Obstacles avoidance can be broken down into three levels. If the user is relatively near to the obstacle (distance t1), the walker would try to steer away from the obstacle. If the user get closer to the obstacle (distance t2), the walker does not have enough distance to steer away. At such, the brake of the frame walker will be activated slowly, proportional to the walker. However, if the user gets very close to the obstacle (distance t3), the brake will be engaged fully.










