Robotic Probe of the Great Pyramid of Egypt
The Great Pyramid of Egypt has always fascinated people because of its ancient mysteries and secrets, which only a few have been discovered. One of the Pyramids, named Khufu Pyramid, is particularly fascinating due to its highly complex interior, which contains countless secret chambers that researchers have yet to discover. In 2003, National Geographic, using the same kind of robot used to search for survivors in the ruins of the World Trade Center, tried to solve a mystery that lies deep in the bowels of the 4,500-year-old Great Pyramid of Giza. Inside the Khufu Pyramid lies one main chamber called the Queen’s Chamber, in which a tiny square tunnel leading to a stone hatch with copper handles was discovered in 1872. No one knows the purpose of the shaft, and no one knows what lies behind the hatch. In addition to that, many air shafts inside the chamber have been discovered but the functions of these shafts were not clear.
The square shaft begins with a "tank trap" or initial dip and appears to end 16.5 meters (54 feet) short of the outer side of the pyramid's surface at the miniature door (shown by the figure below). The door itself is only 8 cm (3.25 inches) thick and seals the end of the narrow shaft. National Geographic designed a robot called “Pyramid Rover” to go up the shaft and find out what lies behind the copper handles at the end of the tunnel. The total length of the shaft is 208 feet or approximately 61 meter and is inclined at 40 degree angle.
 The Technology behind Pyramid Rover
The Technology behind Pyramid Rover
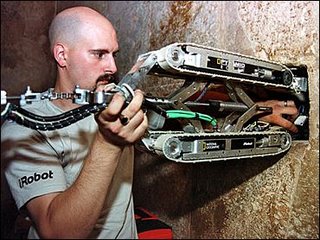
The Pyramid Rover, whose prototype was designed by a German scientist Rudolf Gantenbrink, is equipped with a laser guidance system and a SONY CCD miniature video with pan and tilt capabilities. The structural parts are made of aircraft aluminum and seven independent electric motors with precision gears drive up the upper and lower wheel, providing leverage thrust of 20 kg and pulling power of 40 kg under ideal traction conditions. The CCD video is connected to the monitoring circuit outside the tunnel.
Since no one has explored the square tunnel before, obstacles such as boulders and unanticipated traps were expected. Therefore, Pyramid Rover is built based on information-based criterion to determine the “path strategy” of a robot. The criterion determines the next best path for a robot taking into account the distance traveled to reach a position, obstacle avoidance strategy, and pre-programmed algorithm about the terrain (in this case the square tunnel). If Pyramid Rover finds something it cannot cope with, its computers carry algorithms which should make it stop and check back for instructions.
The square shaft begins with a "tank trap" or initial dip and appears to end 16.5 meters (54 feet) short of the outer side of the pyramid's surface at the miniature door (shown by the figure below). The door itself is only 8 cm (3.25 inches) thick and seals the end of the narrow shaft. National Geographic designed a robot called “Pyramid Rover” to go up the shaft and find out what lies behind the copper handles at the end of the tunnel. The total length of the shaft is 208 feet or approximately 61 meter and is inclined at 40 degree angle.
 The Technology behind Pyramid Rover
The Technology behind Pyramid RoverThe Pyramid Rover, whose prototype was designed by a German scientist Rudolf Gantenbrink, is equipped with a laser guidance system and a SONY CCD miniature video with pan and tilt capabilities. The structural parts are made of aircraft aluminum and seven independent electric motors with precision gears drive up the upper and lower wheel, providing leverage thrust of 20 kg and pulling power of 40 kg under ideal traction conditions. The CCD video is connected to the monitoring circuit outside the tunnel.
Since no one has explored the square tunnel before, obstacles such as boulders and unanticipated traps were expected. Therefore, Pyramid Rover is built based on information-based criterion to determine the “path strategy” of a robot. The criterion determines the next best path for a robot taking into account the distance traveled to reach a position, obstacle avoidance strategy, and pre-programmed algorithm about the terrain (in this case the square tunnel). If Pyramid Rover finds something it cannot cope with, its computers carry algorithms which should make it stop and check back for instructions.
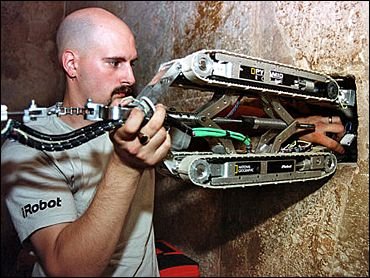
 Pyramid Rover being deployed (left) and inside the square tunnel (right)
Pyramid Rover being deployed (left) and inside the square tunnel (right)
Robot explorers have indeed been playing very important role in other archeological expeditions, helping archeologists unearth ‘lost’ civilizations and solve the underlying ancient mysteries buried underground. So popular the participation of robots in these projects, scientists have come up with a branch of engineering specializing in this area, called “Ancient Engineering”. Who knows what robots may discover next time...










