RoboCup Humanoid League – what is it all about?
“Ladieees and gentlemen!! We have year 2050 now and are going to witness the first in the universe match between the best players of our planet and the team of the humanoid robots... no grandpa you don't need to tune your hearing aid I really said robots!! Who fifty years ago would think it will really happen? …”
Short introduction
 The official goal of the RoboCup[1] initiative is: “By the year 2050, develop a team of fully autonomous humanoid robots that can win against the human world soccer champion team.” The project entails development of soft computing, sensor-fusion, robotics and other related branches of science. Thanks to the clearly specified goal which is far beyond the contemporary science abilities it can bring many innovations applicable in industry as well as in social live.
The official goal of the RoboCup[1] initiative is: “By the year 2050, develop a team of fully autonomous humanoid robots that can win against the human world soccer champion team.” The project entails development of soft computing, sensor-fusion, robotics and other related branches of science. Thanks to the clearly specified goal which is far beyond the contemporary science abilities it can bring many innovations applicable in industry as well as in social live. Main constrains:
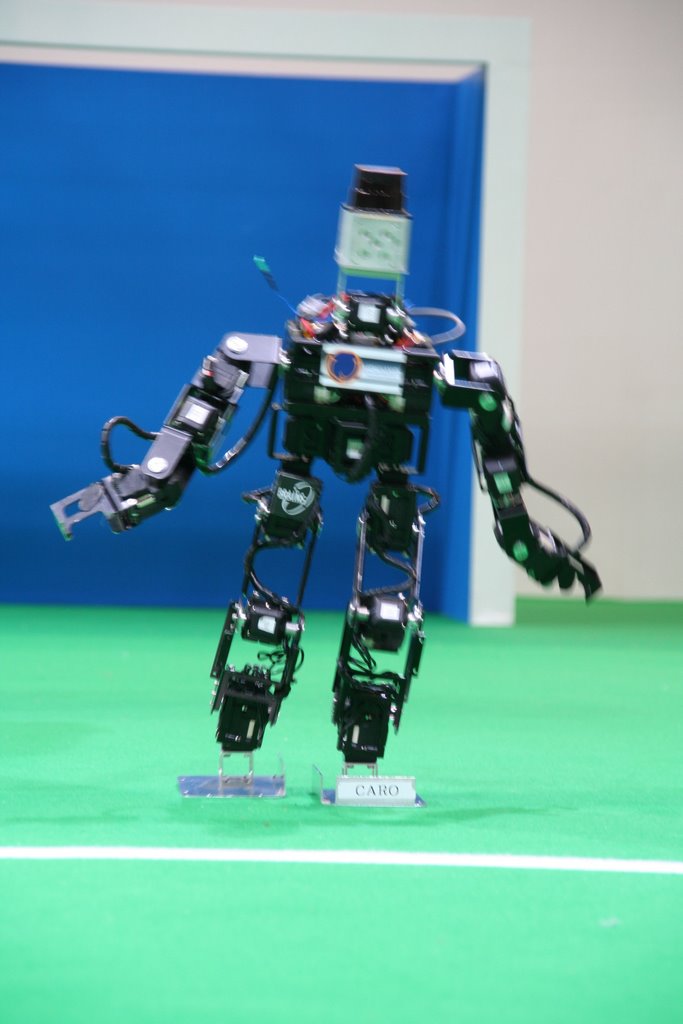
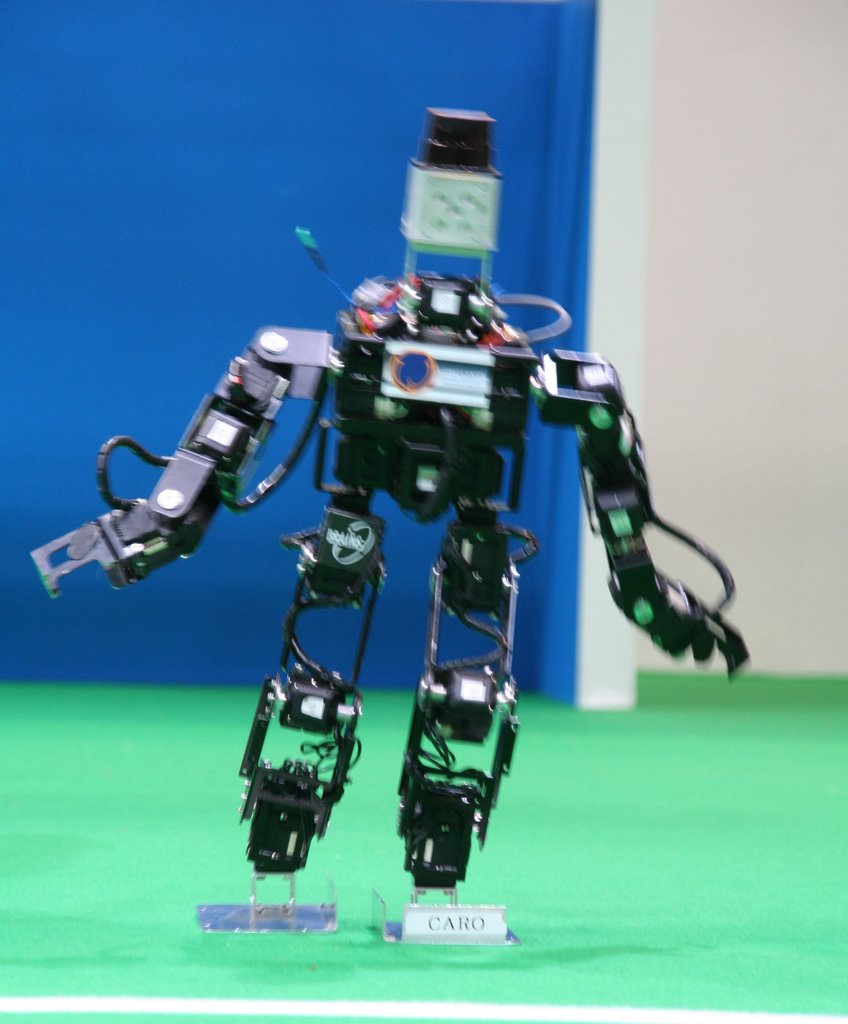 - the robot proportions should be as close as possible to that of human being (exactly specified in rules[2]).
- the robot proportions should be as close as possible to that of human being (exactly specified in rules[2]).- each of the implemented sensory systems must have its equivalent in human being. Only the vision and audio sensors are allowed for localization and all the environment recognition purposes (no infrared, radar and ultrasonic sensors are allowed). In addition, these sensors should be mounted in places of their equivalents in human being.
Main challenges:
- real time vision recognition – the robot in order to play soccer must be able to localize and track the play ground, goals, global localization as well as the exact posture of other players and finally the ball.
- dynamic gait – in order to be able to speed a human being robot must be able to run, what by its definition enforces use of dynamic gait.
- multi-agent systems – as soccer is team game the cooperation between team members is crucial for winning the game. The particular agent must know its position and function in the whole game.
Current stage:
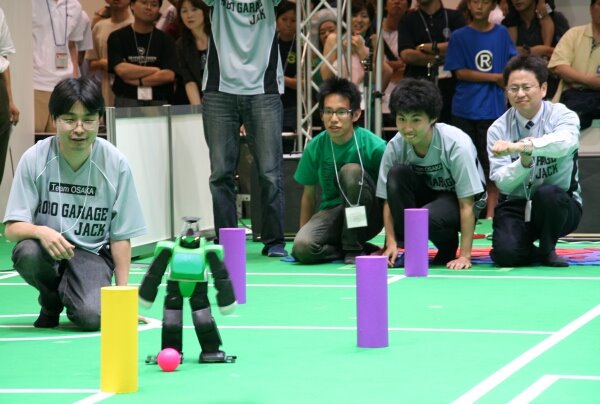
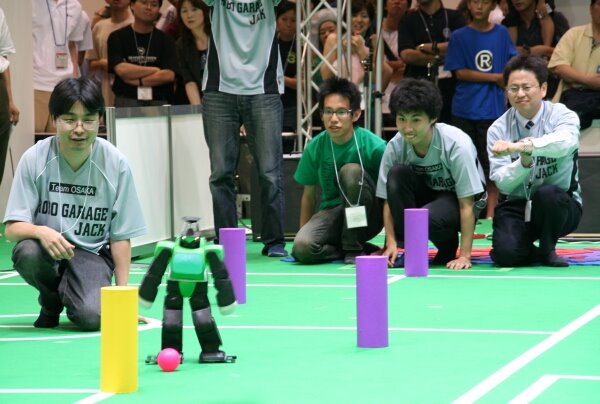 During the last competition in Osaka 2005 robots have been divided into two size groups and had to face such events as: penalty kick, 2 vs. 2 and technical challenge. In upcoming competition in Germany there will be additional ball dribbling and ball passing events. These interested can find the rules here.
During the last competition in Osaka 2005 robots have been divided into two size groups and had to face such events as: penalty kick, 2 vs. 2 and technical challenge. In upcoming competition in Germany there will be additional ball dribbling and ball passing events. These interested can find the rules here.After reading this blog you surely have a lot of questions. I have done it on purpose! Perhaps you think the final game will never take place or it is waste of money to do research in this area. Don't hesitate just write it in comments!!
Source:











{kind=link}
{kind=link}
{kind=link}