Kismet - the Face of the Future
U0204438 Huang Shichao Alvin

Traditionally, autonomous robots have been designed to perform hazardous and/or repetitive tasks. However, a new range of domestic applications such as household chores and entertainment is driving the development of robots that can interact and communicate with humans around them. At present, most domestic robots are restricted to communicating with humans through pre-recorded messages. Communication amongst humans, however, entails much more than just the spoken word, including other aspects such as facial expression, body posture, gestures, gaze direction and tone of the voice.
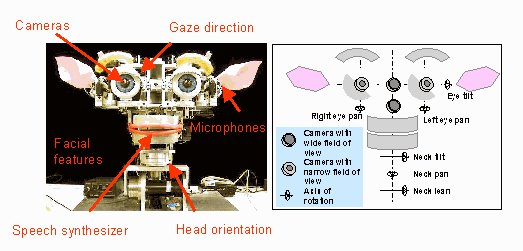
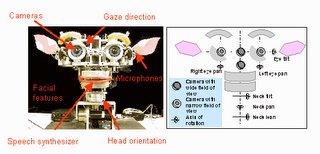 The Sociable Machines Project in MIT has developed an expressive anthropomorphic robot called Kismet that "engages people in natural and expressive face-to-face interaction". To do this, Kismet takes in visual and audio cues from the human interacting with it through 4 colour CCD cameras mounted on a stereo active vision head and a small wireless microphone worn by the human. Kismet has 3 degrees of freedom to control gaze direction and 3 degrees of freedom to control its neck, allowing it to move and orient its eyes like a human, which not only increases the visual perception mechanism but also allows it to use its gaze direction as a communication tool. Kismet has a 15 degree of freedom face that can display a wide assortment of facial expressions, as seen in the picture. This allows it to display various emotions through movement of its eyelids, ears and lips. Lastly, it also has a vocalization system generated through an articulatory synthesizer.
The Sociable Machines Project in MIT has developed an expressive anthropomorphic robot called Kismet that "engages people in natural and expressive face-to-face interaction". To do this, Kismet takes in visual and audio cues from the human interacting with it through 4 colour CCD cameras mounted on a stereo active vision head and a small wireless microphone worn by the human. Kismet has 3 degrees of freedom to control gaze direction and 3 degrees of freedom to control its neck, allowing it to move and orient its eyes like a human, which not only increases the visual perception mechanism but also allows it to use its gaze direction as a communication tool. Kismet has a 15 degree of freedom face that can display a wide assortment of facial expressions, as seen in the picture. This allows it to display various emotions through movement of its eyelids, ears and lips. Lastly, it also has a vocalization system generated through an articulatory synthesizer. In terms of the behaviour of the robot, the system architecture consists of 6 sub-systems: low-level feature extraction, high-level perception, attention, motivation, behaviour and motor systems. Using these systems, the visual and audio cues it receives are classified using the extraction and perception systems. Using the attention, motivation and behaviour systems, the next action taken by the robot is calculated and executed using the motor system. For more information, please refer to here
In terms of the behaviour of the robot, the system architecture consists of 6 sub-systems: low-level feature extraction, high-level perception, attention, motivation, behaviour and motor systems. Using these systems, the visual and audio cues it receives are classified using the extraction and perception systems. Using the attention, motivation and behaviour systems, the next action taken by the robot is calculated and executed using the motor system. For more information, please refer to here
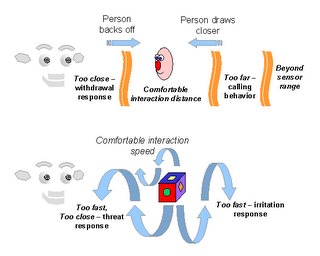 Kismet exhibits several human-like behaviours, which are modeled on the behaviour of an infant, such as moving closer towards an object it is interested in by moving its neck or engaging in a calling behaviour to cause the object to move nearer. It also changes its facial expressions according to whether the visual and audio stimuli are causing it to "feel" happy, sad, etc. Videos of these interactions can be seen here. The use of infant behaviours are meant to simulate parent-infant exchanges to simulate socially situated learning with a human instructor.
Kismet exhibits several human-like behaviours, which are modeled on the behaviour of an infant, such as moving closer towards an object it is interested in by moving its neck or engaging in a calling behaviour to cause the object to move nearer. It also changes its facial expressions according to whether the visual and audio stimuli are causing it to "feel" happy, sad, etc. Videos of these interactions can be seen here. The use of infant behaviours are meant to simulate parent-infant exchanges to simulate socially situated learning with a human instructor.
Kismet represents the next step in human-robot interaction, where robots will share a similar morphology to humans and thus communicate in a manner that supports the natural mode of communication of humans. This will lead to more intuitive and "friendly" designs for robots that will allow them to be more easily accepted by humans as robots become more and more ubiquitous in our lives.
Link to Kismet homepage

Traditionally, autonomous robots have been designed to perform hazardous and/or repetitive tasks. However, a new range of domestic applications such as household chores and entertainment is driving the development of robots that can interact and communicate with humans around them. At present, most domestic robots are restricted to communicating with humans through pre-recorded messages. Communication amongst humans, however, entails much more than just the spoken word, including other aspects such as facial expression, body posture, gestures, gaze direction and tone of the voice.
 The Sociable Machines Project in MIT has developed an expressive anthropomorphic robot called Kismet that "engages people in natural and expressive face-to-face interaction". To do this, Kismet takes in visual and audio cues from the human interacting with it through 4 colour CCD cameras mounted on a stereo active vision head and a small wireless microphone worn by the human. Kismet has 3 degrees of freedom to control gaze direction and 3 degrees of freedom to control its neck, allowing it to move and orient its eyes like a human, which not only increases the visual perception mechanism but also allows it to use its gaze direction as a communication tool. Kismet has a 15 degree of freedom face that can display a wide assortment of facial expressions, as seen in the picture. This allows it to display various emotions through movement of its eyelids, ears and lips. Lastly, it also has a vocalization system generated through an articulatory synthesizer.
The Sociable Machines Project in MIT has developed an expressive anthropomorphic robot called Kismet that "engages people in natural and expressive face-to-face interaction". To do this, Kismet takes in visual and audio cues from the human interacting with it through 4 colour CCD cameras mounted on a stereo active vision head and a small wireless microphone worn by the human. Kismet has 3 degrees of freedom to control gaze direction and 3 degrees of freedom to control its neck, allowing it to move and orient its eyes like a human, which not only increases the visual perception mechanism but also allows it to use its gaze direction as a communication tool. Kismet has a 15 degree of freedom face that can display a wide assortment of facial expressions, as seen in the picture. This allows it to display various emotions through movement of its eyelids, ears and lips. Lastly, it also has a vocalization system generated through an articulatory synthesizer. In terms of the behaviour of the robot, the system architecture consists of 6 sub-systems: low-level feature extraction, high-level perception, attention, motivation, behaviour and motor systems. Using these systems, the visual and audio cues it receives are classified using the extraction and perception systems. Using the attention, motivation and behaviour systems, the next action taken by the robot is calculated and executed using the motor system. For more information, please refer to here
In terms of the behaviour of the robot, the system architecture consists of 6 sub-systems: low-level feature extraction, high-level perception, attention, motivation, behaviour and motor systems. Using these systems, the visual and audio cues it receives are classified using the extraction and perception systems. Using the attention, motivation and behaviour systems, the next action taken by the robot is calculated and executed using the motor system. For more information, please refer to here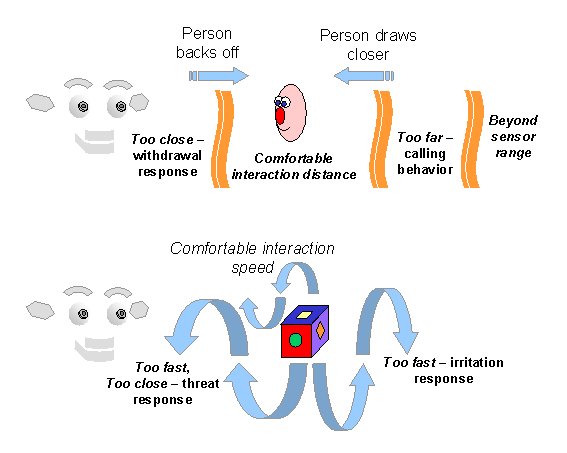 Kismet exhibits several human-like behaviours, which are modeled on the behaviour of an infant, such as moving closer towards an object it is interested in by moving its neck or engaging in a calling behaviour to cause the object to move nearer. It also changes its facial expressions according to whether the visual and audio stimuli are causing it to "feel" happy, sad, etc. Videos of these interactions can be seen here. The use of infant behaviours are meant to simulate parent-infant exchanges to simulate socially situated learning with a human instructor.
Kismet exhibits several human-like behaviours, which are modeled on the behaviour of an infant, such as moving closer towards an object it is interested in by moving its neck or engaging in a calling behaviour to cause the object to move nearer. It also changes its facial expressions according to whether the visual and audio stimuli are causing it to "feel" happy, sad, etc. Videos of these interactions can be seen here. The use of infant behaviours are meant to simulate parent-infant exchanges to simulate socially situated learning with a human instructor.Kismet represents the next step in human-robot interaction, where robots will share a similar morphology to humans and thus communicate in a manner that supports the natural mode of communication of humans. This will lead to more intuitive and "friendly" designs for robots that will allow them to be more easily accepted by humans as robots become more and more ubiquitous in our lives.
Link to Kismet homepage









