Robotic Telesurgical Workstation for Laparoscopy
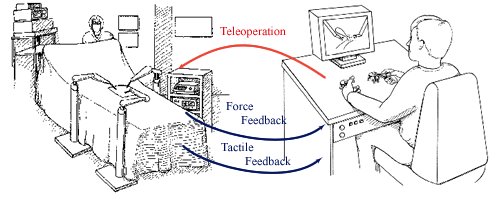
To increase the dexterity, a 6 DOF slave manipulator will be controlled through a 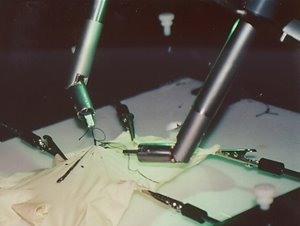 spatially consistent and intuitive master. The force feedback to the master will increase the fidelity of the manipulation and the tactile feedback will restore the tactile sensation. The workstation will incorporate two robotic manipulators with dexterous manipulation and tactile sensing capabilities, master devices with force and tactile feedback, and improved imaging and 3D display systems, all controlled through computers. This system is both highly dexterous and intuitive to use.
spatially consistent and intuitive master. The force feedback to the master will increase the fidelity of the manipulation and the tactile feedback will restore the tactile sensation. The workstation will incorporate two robotic manipulators with dexterous manipulation and tactile sensing capabilities, master devices with force and tactile feedback, and improved imaging and 3D display systems, all controlled through computers. This system is both highly dexterous and intuitive to use.
In the procedure for MIS of the abdomen, for example, a laparoscope is inserted with a cannula through a 10 mm incision in the abdominal wall. A CCD camera mounted on the laparoscope transmits the image to a CRT monitor is viewed by the surgical team. Several instruments such as graspers are inserted through separate cannulas. A commercial voice-actuated manipulator is also available to control the laparoscope.
References:
1) http://robotics.eecs.berkeley.edu/medical/
2) L. W. Way, S. Bhoyrul, and T. Mori, Fundamentals of Laparoscopic Surgery, Churchill Livingstone, 1995.










