Vision-based mobile robot for autonomous exploration
Recently, most mobile robots have to use laser sensor to perceive their surrounding environment. It is true that laser is quite accurate for the robots to measure the distance to the objects so that they can navigate and map the dynamic environments. However, when the object is very large, laser sensor could not detect the whole object.
Stereo vision can solve the problem that laser sensor has by capturing the image data and measuring the distance to the object at the same time. The image data can be used for localization and recognition of object and people. The reasons for not using the stereo vision are: the computers were not fast enough to process the data; the algorithms to make the computer vision work were not developed.
Now, the faster development in computer vision has made it possible to construct the visually guided mobile robots. For instance, Rob Sim and his colleagues at the University of British Columbia, Canada, have developed such a robot that can estimate its location and map the environment. Last summer, Rob has demonstrated that his robot can autonomously explore a large office-like environment and correctly identify the position as well as construct the occupancy grid map.
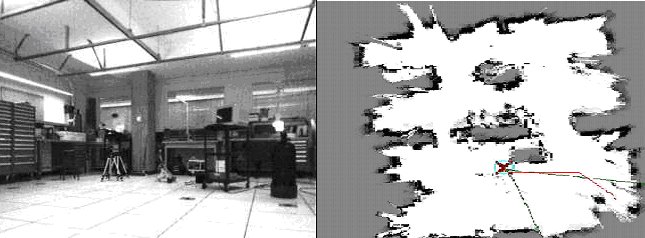
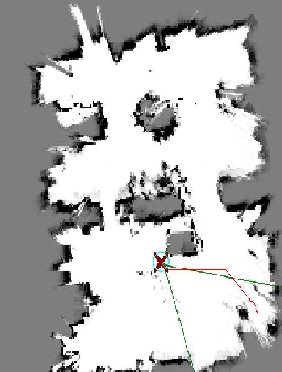
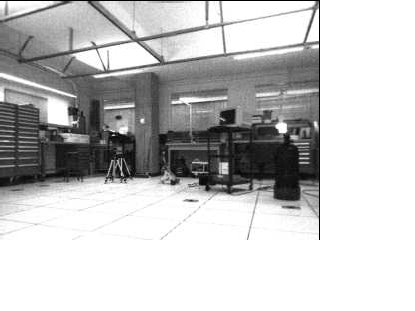
On the top are the sample image of the office and occupancy grid map. We can see that the occupancy grid map constructed from the robot’s exploration with grid resolution 0.01m by 0.01m per pixel can accurately captures the topology of the environment. The cluttered regions are corresponding to the office chairs and other furniture.
Reference:
http://www.cs.duke.edu/researchers/artificial_intelligence/papers/Sim06.pdf
Liu PengYin U037121E









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}