Balancing Ballbot Demonstrates Dynamic Stability
Another ingenious invention from the robot pioneers at Carnegie Mellon University.
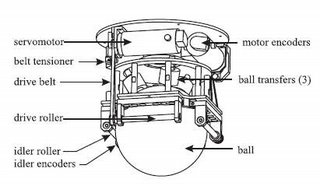
Ballbot moves and balances on a single spherical wheel.
The design of the robot is as tall as a person and slender enough to negotiate a crowded room. The center of gravity is high but it will not tip over.

The project leader, Professor Ralph Hollis, says, "We wanted to create a robot that can maneuver easily and is tall enough to look you in the eye."
Ballbot's brains read balance information from its internal sensors and activate rollers to move the ball on which it stands.
When powered down it rests in place on three retractable legs.
Dr. Hollis recognized problems with current attempts at service robots trying to interact with people. Many robots are heavy, have a low center of gravity and are dangerous to be around. Ballbot on the other hand is agile and can yield when bumped or pushed.
Their goal is to get a robot that can easily and safely work with people in their home or workplace.
Carnegie Mellon Press Release: August 9, 2006
Movies: balance, motion
Ballbot moves and balances on a single spherical wheel.
The design of the robot is as tall as a person and slender enough to negotiate a crowded room. The center of gravity is high but it will not tip over.

The project leader, Professor Ralph Hollis, says, "We wanted to create a robot that can maneuver easily and is tall enough to look you in the eye."
Ballbot's brains read balance information from its internal sensors and activate rollers to move the ball on which it stands.
When powered down it rests in place on three retractable legs.

Dr. Hollis recognized problems with current attempts at service robots trying to interact with people. Many robots are heavy, have a low center of gravity and are dangerous to be around. Ballbot on the other hand is agile and can yield when bumped or pushed.
Their goal is to get a robot that can easily and safely work with people in their home or workplace.
Carnegie Mellon Press Release: August 9, 2006
Movies: balance, motion









